FM_spot_quart
FM_spot_quart computes the spot quarticity of a diffusion process via the Fourier-Malliavin estimator
Syntax
Description
Examples
 Example of call of FM_spot_quart with default values of N,M,L and tau.
Example of call of FM_spot_quart with default values of N,M,L and tau.
Example of call of FM_spot_quart with default values of N,M,L and tau.The following example estimates the path of the spot quarticity of a random process following the Heston model from a discrete sample. The Heston model assumes that the spot variance follows a Cox-Ingersoll-Ross model.
% Heston model simulation
T=1;
n=23400;
parameters=[0,0.4,5,1];
rho=-0.5;
x0=log(100);
V0=0.4;
[x,V,t] = Heston1D(T,n,parameters,rho,x0,V0);
% Spot qaurticity estimation
[Q_spot, tau_out] = FM_spot_quart(x,t,T);
L=(length(Q_spot)-1)/2;
figure
Q=V.^2;
plot(tau_out,Q(1:round(n/(2*L)):end));
hold on
plot(tau_out,Q_spot);
title('Spot quarticity estimates Vs Actual values')
legend('Actual values','Estimated values')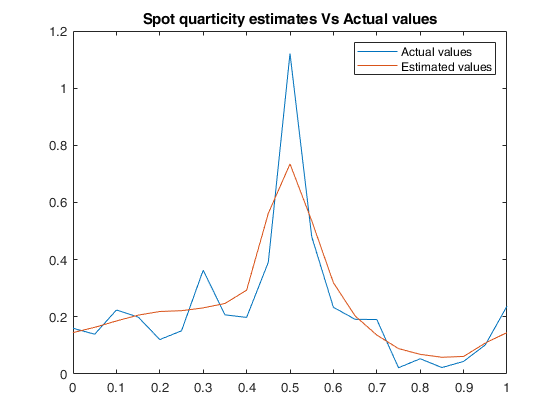
Example of call of FM_spot_quart with custom choices of N,M,L and tau.
Example of call of FM_spot_quart with custom choices of N,M,L and tau.The following example estimates the path of the spot quarticity of a random process following the Heston model from a discrete sample. The Heston model assumes that the spot variance follows a Cox-Ingersoll-Ross model.
% Heston model simulation
T=1;
n=23400;
parameters=[0,0.4,5,1];
rho=-0.5;
x0=log(100);
V0=0.4;
[x,V,t]=Heston1D(T,n,parameters,rho,x0,V0);
% Spot quarticity estimation
tau=0:T/10:T;
[Q_spot,tau_out]= FM_spot_quart(x,t,T,'N',11000,'M',120,'L',15,'tau',tau);
figure
Q=V.^2;
plot(tau_out,Q(1:round(n/10):end));
hold on
plot(tau_out,Q_spot);
xlabel('tau');
title('Spot quarticity estimates Vs Actual values')
legend('Actual values','Estimated values')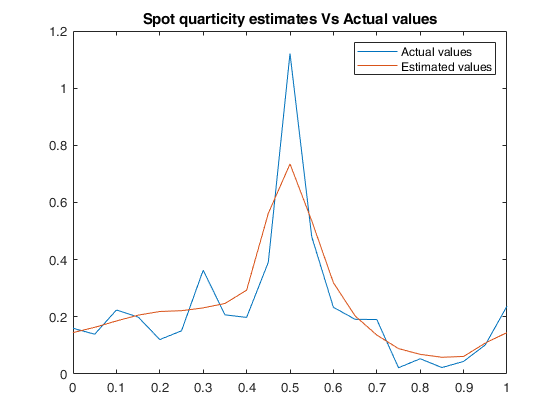
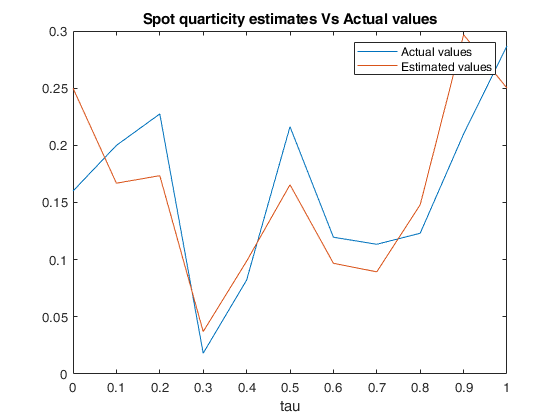
Example of call of FM_spot_quart when tau has length larger than 2L + 1.
Example of call of FM_spot_quart when tau has length larger than 2L + 1.The following example estimates the path of the spot quarticity of a random process following the Heston model from a discrete sample. The Heston model assumes that the spot variance follows a Cox-Ingersoll-Ross model.
% Heston model simulation
T=1;
n=23400;
parameters=[0,0.4,5,1];
rho=-0.5;
x0=log(100);
V0=0.4;
[x,V,t]=Heston1D(T,n,parameters,rho,x0,V0);
% Spot quarticity estimation
tau=0:T/500:T;
[Q_spot,tau_out]= FM_spot_quart(x,t,T,'N',11000,'M',120,'L',10,'tau',tau);
figure
Q=V.^2;
L=10;
plot(tau_out,Q(1:round(n/(2*L)):end));
hold on
plot(tau_out,Q_spot);
xlabel('tau');
title('Spot quarticity estimates Vs Actual values')
legend('Actual values','Estimated values')WARNING: estimation will be performed on the equally-spaced grid with mesh size equal to T/(2*L), provided as an output variable.
Input Arguments
Output Arguments
More About
References
Mancino, M.E., Recchioni, M.C., Sanfelici, S. (2017), Fourier-Malliavin Volatility Estimation. Theory and Practice, "Springer Briefs in Quantitative Finance", Springer.
Sanfelici, S., Toscano, G. (2024), The Fourier-Malliavin Volatility (FMVol) MATLAB toolbox, available on ArXiv.